This project involves the development and implementation of an autonomous TurtleBot capable of exploring and mapping an unknown environment. The key features of the project include:
- Simultaneous Localization and Mapping (SLAM): Used GMapping for accurate mapping.
- Robot Platform: Utilized an iClebo Kobuki base equipped with:
- Bumper sensors
- Cliff sensors
- Kinect RGB camera and depth sensors.
- Environment Constraints: Explored a 4.87 x 4.87 m² area with obstacles, completing the task autonomously within 8 minutes.
Technology Stack
- Language: C++
- Algorithm: Depth-First Search (DFS) for exploration.
- Framework: Robot Operating System (ROS).
- Sensors: Laser, bumper, and odometry sensors for navigation and localization.
Features
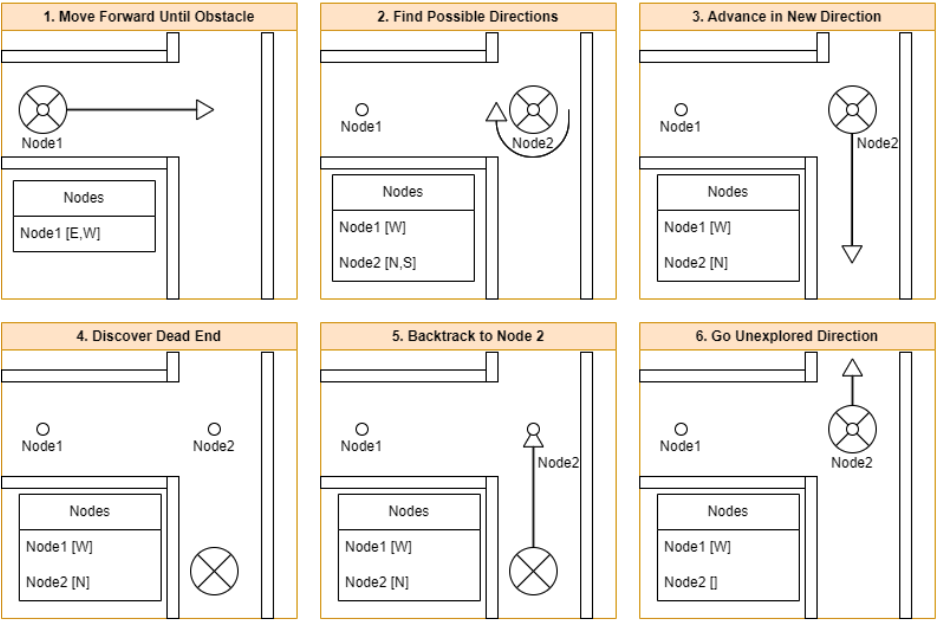
Exploration Strategy
- Comprehensive Mapping: Implemented a DFS algorithm to ensure systematic traversal.
- Obstacle Avoidance:
- Laser Sensors: Detected obstacles and facilitated real-time adjustments.
- Bumper Sensors: Detected close-range collisions to complement laser feedback.
- Node-Based Navigation: Ensured efficient exploration while minimizing redundant paths.
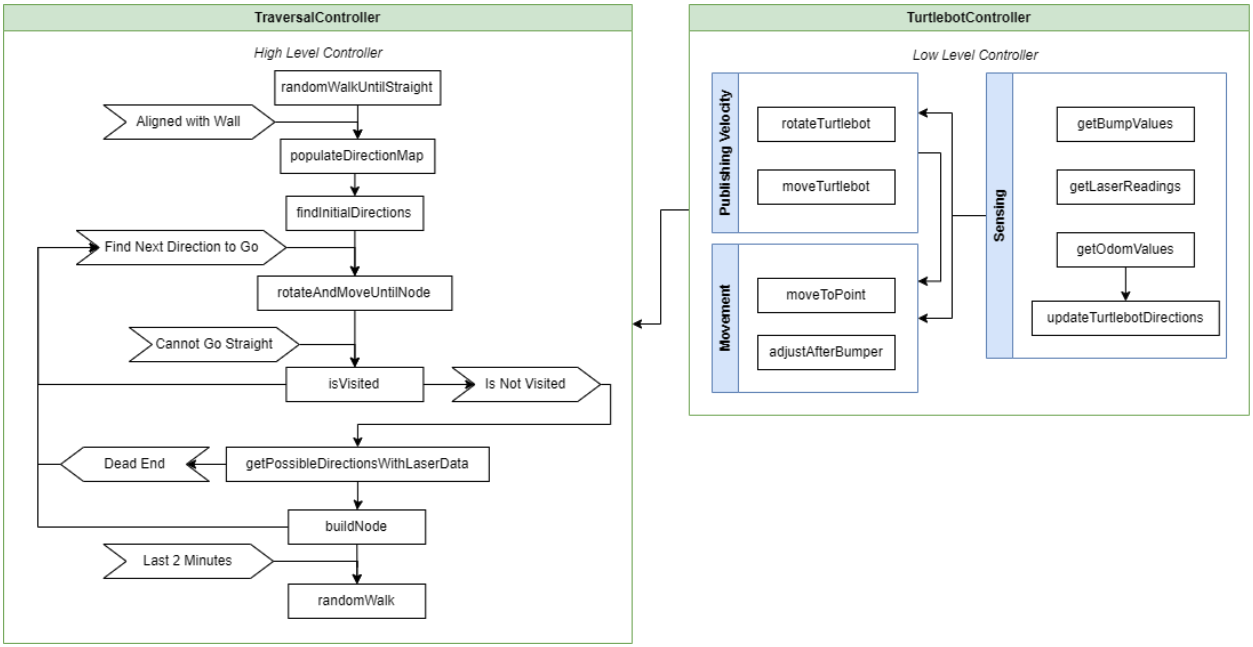
Robot Design
- High-Level Controller:
- Executed the DFS algorithm to determine optimal paths.
- Planned valid object detection locations to ensure clear visibility.
- Low-Level Controller:
- Managed sensor inputs and actuator responses for obstacle avoidance.
- Utilized accelerometer data to create a proportional controller for precise movement.
Key Findings
- DFS Algorithm:
- Structured exploration allowed efficient coverage, but occasional inaccuracies occurred due to sensor drift.
- Randomized Exploration:
- Improved coverage of unexplored areas by adding random movements during the final 2 minutes.
- Precise Navigation:
- Adjusted sensory feedback and control responses enabled effective obstacle avoidance and navigation.
Recommendations
- Frontier-Based Exploration:
- Use occupancy grids to dynamically identify unexplored regions.
- Path Planning Optimization:
- Implement advanced algorithms like A* for enhanced traversal efficiency.
- Robust Testing:
- Conduct real-world trials in diverse environments to refine the system.