Maze-Solving Rover Project

Project Overview
The Wall-E Vader project focused on designing an autonomous rover capable of navigating a predefined maze, localizing itself, avoiding obstacles, and completing tasks such as picking up and delivering a block to designated zones. The rover achieved SAE Level 5 autonomy by integrating obstacle avoidance, localization, and block manipulation into a single operational algorithm.
Key Features and Strategies
Obstacle Avoidance
- Sensors:
- Four ultrasonic sensors and two infrared (IR) sensors for precise obstacle detection and corner handling.
- Challenges Addressed:
- Replaced unreliable ultrasonic corner sensors with IR sensors for improved detection.
- Enhanced calibration and redesigned sensor mounts for consistent readings.
- Results:
- Successfully avoided major collisions, enhancing the overall reliability of navigation.
Localization and Navigation
- Algorithm:
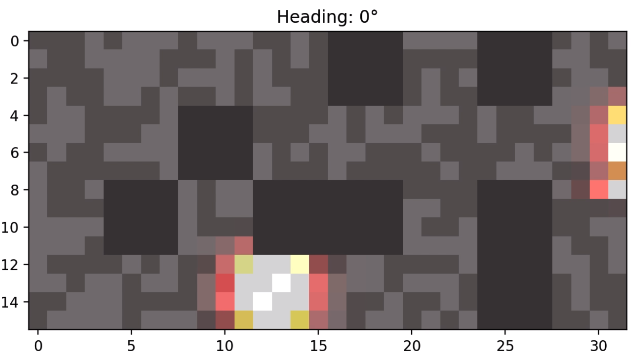
- Employed histogram-based localization combined with a compass for orientation.
- designed a heat map to visualize the rover's localization status
- Efficiency:
- Localized within 1–2 maze squares of movement, leveraging predefined paths and headings.
- Execution:
- Hard-coded paths simplified navigation but limited adaptability to environmental changes.
Heatmap overlayed on top of the known maze design
Block Pick-Up and Delivery
- Detection:
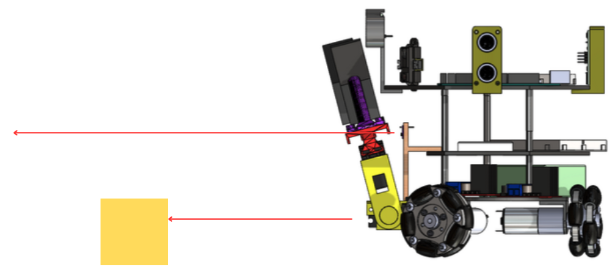
- Dual time-of-flight sensors identified blocks based on vertical offsets.
- Manipulation:
- Servo-powered rack-and-pinion claw picked up blocks, assisted by a funnel design to correct alignment errors.
- Challenges:
- Sensor misalignments and mounting inconsistencies were mitigated but not fully eliminated.
- Hard-coded paths required precise block placement within the maze.
Time-of-flight sensor layout
Integration
- All subsystems were combined seamlessly into a unified algorithm.
- Starting locations and transitions between tasks were carefully managed to ensure autonomous operation.
Final Results
- Performance:
- Completed the maze in 3 minutes 20 seconds, well under the 5-minute limit.
- Reliability:
- Executed navigation, localization, and block delivery with minimal errors.
- Key Insights:
- Accurate localization achieved via a compass-aided algorithm.
- Gripper’s modular design allowed reliable block handling, though reliance on predefined conditions limited robustness.
Recommendations and Improvements
Mechanical Design
- Improve structural integrity by replacing taped or glued components with robust mounts.
- Balance weight distribution to reduce the need for frequent motor recalibrations.
Algorithm Enhancements
- Transition from hard-coded paths to dynamic path planning algorithms for better adaptability.
- Implement real-time angle corrections during navigation and block handling.
Electrical Optimization
- Organize cable routing to simplify troubleshooting.
- Incorporate encoder feedback to improve movement precision.
Sensor Utilization
- Optimize sensor routines to reduce processing delays.
- Enhance the block-finding algorithm to handle arbitrary block placements.