Project Overview
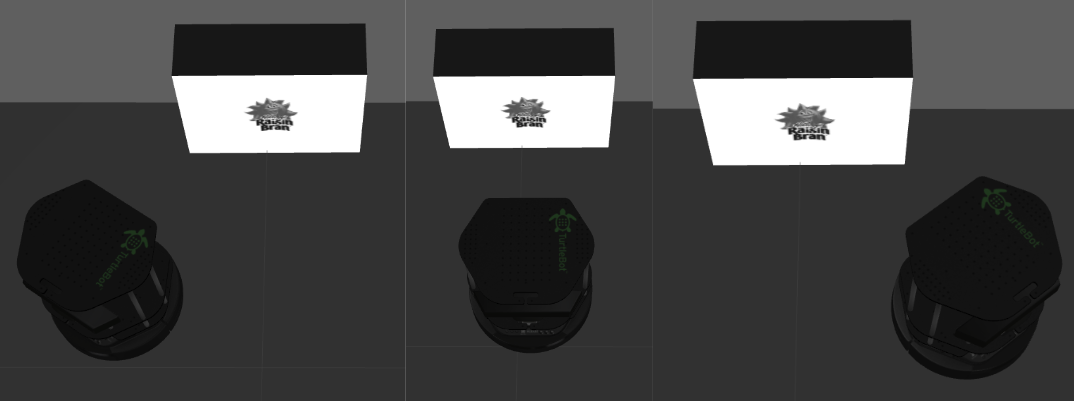
This project focused on programming a TurtleBot to autonomously navigate a mapped environment, locate objects, and identify image tags placed on them. Key features of the project included:
- Robot Operating System (ROS) for navigation and control.
- Kinect 360 Sensor for image recognition and depth sensing.
- AMCL for localization and move_base for navigation.
Task Requirements
The TurtleBot was required to:
- Complete the circuit within 5 minutes.
- Return to the starting location with object identification results.
Key Strategies
Navigation
- Nearest-Neighbor Algorithm:
- Optimized object visitation order by minimizing Euclidean distances between objects.
- Object Positioning:
- Calculated valid positions relative to objects to ensure clear detection.
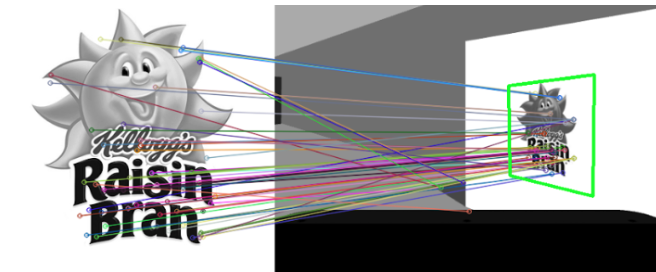
Object Identification
- OpenCV's SURF Algorithm:
- Utilized for feature detection and matching, with FLANN for template matching.
- Fine-Tuned Parameters:
- Addressed discrepancies between simulated and real-world conditions.
- Confidence Levels:
- Determined matches for template images, blank images, and duplicates based on confidence thresholds.
Robot Design and Implementation
Sensory Systems
- Depth Sensor: Detected obstacles and aided navigation.
- RGB Camera: Captured images for object identification.
- Bumper Sensors: Detected collisions and complemented depth sensors for blind spots.
- Odometry: Provided relative position and orientation data to ensure accurate localization.
Controller Architecture
- High-Level Control:
- Determined the robot's global path and object interaction strategy.
- Low-Level Control:
- Managed manual movement in high-cost map areas and handled obstacle avoidance in real-time.
Visualization of high-cost region on cost map

Performance Metrics
- Successfully completed the circuit with reliable object detection in real-world tests.
- Navigation and object identification were effective but highlighted areas for improvement:
- Path Planning: Transition from Euclidean metrics to map-based distances for accuracy.
- Advanced Image Recognition: Integrate machine learning models such as YOLO or CNNs.
Recommendations for Improvement
- Path Planning:
- Implement frontier-based exploration for dynamic path planning.
- Image Recognition:
- Adopt machine learning techniques for enhanced accuracy.
- Testing:
- Conduct extensive trials in diverse environments to ensure robust performance.